TP-PICAXE-01
 |
Logiciel :
programming Editor
| - Prise en main du logiciel
- Notion d'organigramme
- Démarche expérimentale
- Déplacement du robot en ligne droite
|
|
| Fiche : TP-Picaxe-01 |
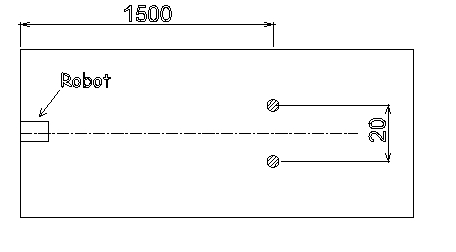
Préambule & Cahier des charges : | Notre robot est constitué de 2 moteurs ( un pour chaque roue ), ces 2 moteurs ne sont pas strictements identiques ( mécaniquement et electriquement ) Pour permettre à notre robot de se déplacer en ligne droite, il est possible de régler indépendamment chaque moteur par la commande SPEED
Cahier des charges : Notre robot devra : - Démarrer après une temporisation de 3 secondes ( commande Wait )
- Parcourir en ligne droite au minimum une distance de 1500 mm ( commande Pause pour le temps de parcours )
- Passer entre les 2 bornes distantes de 200 mm sans les toucher. ( comande Speed ...... / ..... )
- S'arrêter après le passage des 2 bornes ( commande Halt pour arrêter le robot )
Pour cela vous disposez de 5 tentatives pour ajuster les paramètres :
- Pour rouler en ligne droite : SPEED ........ / .......... : vitesses des moteurs droit et gauche
- Pour le temps de parcours : PAUSE ............. : valeur en milliseconde
Vous pouvez débuter vos essais par les valeurs : Speed 100 / 100 ( la valeur du moteur droit restera à 100, faire varier celle du moteur gauche si nécessaire ) Pause 7000 Sauvegarder votre organigramme dans le dossier classe pour programmer votre robot
Imprimer puis completez la fiche d'investigation avant et après chaque tentative | 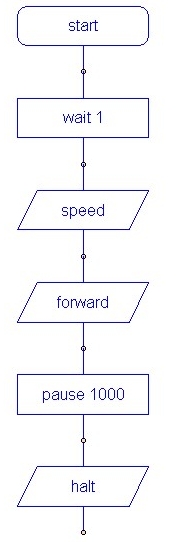  | Documents: |

|  | | Organigramme TP-01 (à ouvrir avec Programming Editor)
| Fiche d'investigation |
Documentation
|
|